依赖库安装
使用以下命令安装
1 | sudo apt install libglu1-mesa-dev freeglut3-dev mesa-common-dev xorg-dev |
不要直接从pdf上复制命令,pdf上的横线符号是错误的,会导致 unable to locate
段错误
来自在 Win10 下配置 GAMES101 开发环境(WSL2) - 知乎 (zhihu.com)
1.执行
1 | export LIBGL_ALWAYS_INDIRECT=0 |
2.下载MobaXterm,作为终端启动ropesim
但是,我的MobaXterm中只有一个WSL,上文提到图形界面显示失败的问题并未解决。
下面是通过StackOverflow等摸索而来:
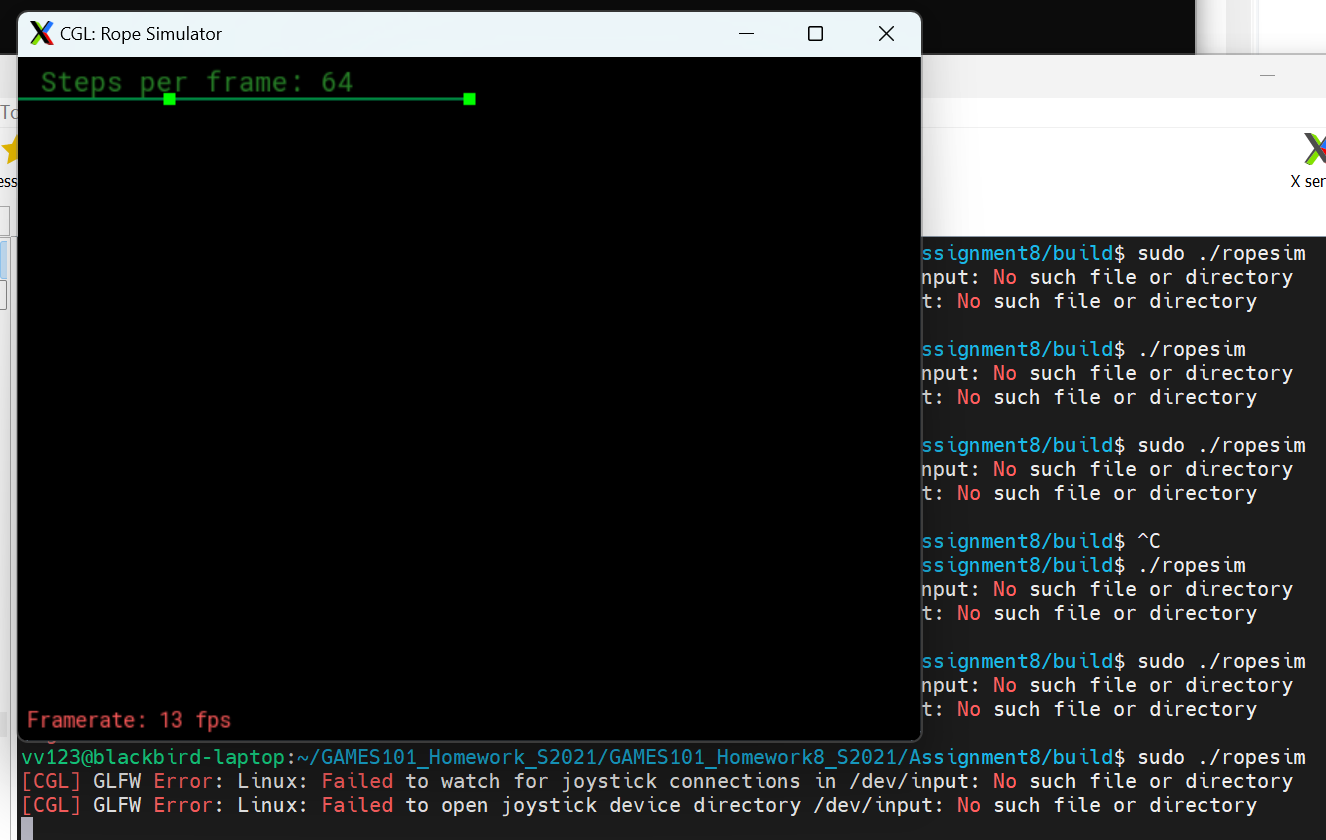
GLFW Error: Linux: Failed to watch for joystick…
执行
1 | touch ~/.Xauthority |
然后重启MobaXterm,
然后执行
1 | sudo cp ~/.Xauthority /root/ |
然后使用sudo打开ropesim
1 | sudo ./ropesim |
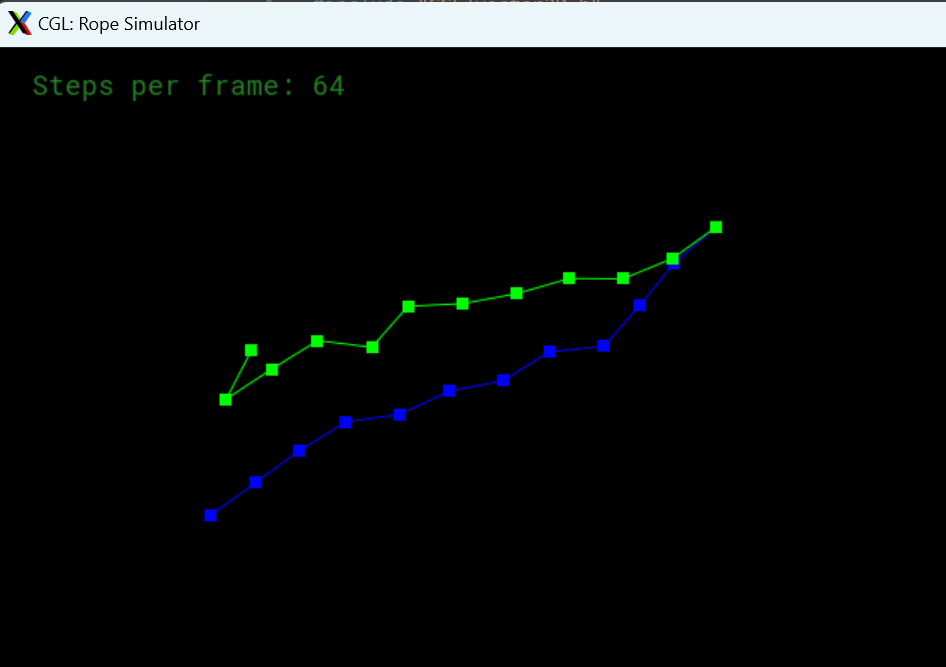
虽然仍会显示GLFW Error,但能够成功显示窗口。
弹簧乱飞
参考:
关于作业8的一些问题解答 – 计算机图形学与混合现实在线平台 (games-cn.org)
对于显示欧拉法,是正常的,减小步长(如 sudo ./ropesim -s 1024 )可以减缓发散的时间(但还是会发散)
对于Verlet方法,要在计算每个质点后把 m->forces清零,上面simulateEuler函数中已经给出,此处需要自己加上。
完整代码
1 |
|